

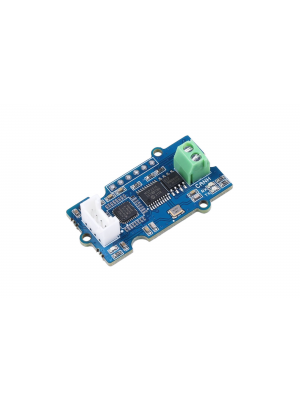
CAN FD Shield for Arduino
The CAN-FD Shield is a reliable and versatile solution for adding CAN-BUS (CAN-FD) capabilities to your Arduino projects, particularly in the realm of automotive diagnostics and data logging.
$19.90
Availability: In stock
SKU
1030012
- Buy 5 for $18.91 each and save 5%
- Buy 10 for $17.91 each and save 10%
- Buy 50 for $15.92 each and save 20%

The CAN-FD Shield is a reliable and versatile solution for adding CAN-BUS (CAN-FD) capabilities to your Arduino projects. With its MCP2517FD CAN Bus controller, SIT1042T CAN transceiver, and built-in SD card slot, it makes it easy to build an onboard diagnostic device or data logger for vehicles.
This shield is designed to meet the highest standards of quality and safety, and has passed both CE and FCC certifications. This means that users can use the CAN-FD Shield with complete confidence, knowing that it has been thoroughly tested and meets international safety and performance standards.
In addition to its certifications, the CAN-FD Shield is compatible with both CAN-FD and CAN 2.0 protocols, features an industrial standard 9-pin sub-D connector, selectable OBD-II and CAN standard pinouts, adjustable chip select and INT pins, and Arduino Uno pin headers. The high-speed SPI interface has a maximum speed of 10 MHz, making it ideal for efficiently logging data points from vehicles.
Application Ideas
- ● Build an onboard diagnostic tool for vehicles. Using the OBD-II converter cable and library, you can access a range of diagnostic information from the vehicle's computer and display it on the Arduino.
- ● Create a data logger for vehicles. The CAN-FD Shield's high-speed SPI interface allows you to quickly and efficiently log a variety of data points from the vehicle, such as engine performance, fuel efficiency, and more.
- ● Develop a device for monitoring and controlling industrial machinery. The CAN-FD Shield's compatibility with both CAN-FD and CAN 2.0 protocols makes it a suitable choice for use in industrial settings, where it can be used to monitor and control various types of machinery.
- ● Create a device for automating tasks on a production line. The CAN-FD Shield's ability to communicate with other devices via the CAN bus makes it well-suited for use in automated production lines, where it can be used to trigger events and perform tasks as needed.
Features:
- ● Compatible with both CAN-FD and CAN 2.0 protocols for versatile use in various applications
- ● Industrial standard 9-pin sub-D connector for compatibility with industry-standard devices
- ● Selectable OBD-II and CAN standard pinouts for flexible use and ease of integration
- ● Adjustable chip select and INT pins for customization and convenience
- ● Arduino Uno pin headers for easy connection to an Arduino board
- ● High-speed SPI interface with a maximum speed of 10 MHz for efficient data communication
- ● Supports CAN-FD transmission with a maximum speed of 5 Mb/s
- ● Suitable for building an onboard diagnostic tool or data logger for vehicles
- ● New CANBed with an aluminum alloy case available for a durable and convenient casing option.
ECCN/HTS:
- ● HSCODE: 8543709990
- ● USHSCODE: 8517620090
Peferences:
- ● Wiki
- ● Arduino Library
- ● EAGLE File
- ● CAN Bus Products - Selection Guide
- ● CE Certification
- ● FCC Cerfitication
Certification
This product has been certified by CE and FCC, and you can download the certificate in the Preferences section.

PCS:
Are you tired of settling for off-the-shelf products that don't quite fit your needs? Look no further! Introducing Product Customization Service (PCS) from Longan Labs - your one-stop solution for all your product design needs.
At PCS, we believe in tailoring products to fit the unique needs and vision of our customers. That's why we offer a full suite of design services, including schematic design, PCB layout, program design, industrial design, and even small-scale and mass production. No matter what product you have in mind, we'll work with you every step of the way to bring your ideas to life.
But what if your dream product requires something extra special? No problem! Simply reach out to us at pcs@longan-labs and our team of experts will provide you with a customized solution that fits your specific requirements.
At PCS, we're passionate about helping you turn your product vision into a reality. So why settle for a cookie-cutter solution when you can have a product that's truly one-of-a-kind? Contact us today to learn more about how we can help bring your ideas to life.
Visit PCS for more information.
Payment Method:

- ● Paypal is the preferred and most efficient payment method on our website.
- ● If you are unable to pay with Paypal, we also accept bank wire transfers. To place an order using this method, please send an email to order@longan-labs.cc with the products and quantities you need. We will respond promptly and provide you with a quotation. The goods will be shipped after payment has been received and verified, and a tracking code will be provided to you.
Logistics:

- ● Your package will be shipped from China, and we are able to deliver to most countries around the world.
- ● By default, we use 4PX as our logistics provider. Shipping fees start at $5 and delivery time is typically 7-10 days for North America and Europe. You can visit our logistics page for more information on shipping fees and delivery times.
- ● If you need to receive your package faster, you can contact us at order@longan-labs.cc to arrange for shipping with DHL or FedEx.
After-sales Policy:

- ● All of our products are strictly tested before delivery, but due to transportation and other factors, it is still possible to receive a defective product.
- ● If you receive a product that is not working, please contact our tech support engineer at support@longan-labs.cc. They will respond to your email within 24 hours and guide you through troubleshooting the issue.
- ● If it is determined that the product is defective, you can choose to receive either a refund or a replacement product without returning the original.
Partner with Us as a Distributor
Are you interested in becoming a distributor for Longan Labs and offering our products and services to your customers? We would love to hear from you!
By partnering with us, you'll have access to exclusive pricing and support as a distributor. Simply reach out to us at info@longan-labs.cc to learn more about becoming a distributor for Longan Labs.
Join us in bringing innovative and customized solutions to customers everywhere. Contact us today to learn more about this exciting opportunity.
About Longan Labs:

Longan Labs is an international platform that offers open source products and customized services to global makers. It is also a co-creation laboratory that works with makers and connects projects to customers. Our offerings include CAN Bus development boards, electronic modules for popular MCU platforms, and other open source hardware gadgets. We also provide Product Customization Services (PCS), developing controller boards and modules to meet the needs of makers and start-up teams.
Longan Labs is based in Shenzhen, which has the most complete R&D and manufacturing resources. Our core team members have over 10 years of experience running open source hardware projects and expertise in various fields including engineering, design, manufacturing, supply chain, logistics, sales, and technical support. As a result, Longan Labs can provide a one-stop product development service, including electronic circuit design, software coding, PCB layout and assembly, industrial design, structure and molding, brand and graphic design.
The name Longan is derived from a type of Chinese fruit that we all love. We started as a small maker project in the summer of 2014, when it is the best time to enjoy longans. In the spring of 2018, we formed the company to offer more products and better service. Our initial idea was inspired by the maker culture and open source hardware, and our corporate vision is to help global makers and the open source community.
Write Your Own Review
We found other products you might like!


Related Products
Check items to add to the cart or
